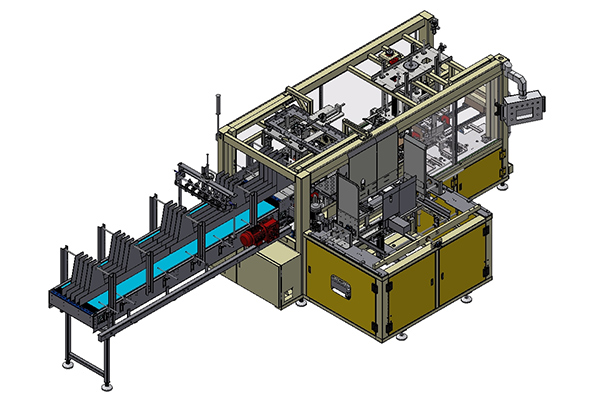
Layin tattara kaya na Servo (tare da bangare na kwali)

Layin samar da marufi ya ƙunshi mai rarraba sauri mai sauri, layin isar da samfur, layin jigilar kaya, Hbot, injin motsi biyu, layin isar da akwatin, injin ganowa, madaidaicin sashi na kwali, tsarin ciyar da katako na kwali, daidaitawar servo, mai ɗaukar kwalban, da shinge mai kariya. Babban mai rarrabawa mai sauri yana rarraba samfuran zuwa hanyoyi masu yawa, yayin da injin motsi biyu na motsi yana haɓaka hanyar samfuran. Bayan samfurin ya isa tashar rarraba kwali, Robot Scar ya loda sashin kwali a cikin samfuran da aka shirya. Samfuran sun isa wurin jigilar kaya. Bayan haka, ana ɗaukar samfuran ta hanyar gripper kuma a sanya su cikin akwatin kwali, kuma mai ɗaukar akwatin yana jigilar akwatin da ke ɗauke da samfurin waje.
Cikakken tsarin shiryawa

Babban tsari
| Robot hannu | ABB/KUKA/Fanuc |
| Motoci | SEW/Nord/ABB |
| Servo motor | Siemens/Panasonic |
| VFD | Danfoss |
| Photoelectric firikwensin | RASHIN LAFIYA |
| Kariyar tabawa | Siemens |
| Ƙananan na'urorin lantarki | Schneider |
| Tasha | Phoenix |
| Cutar huhu | FESTO/SMC |
| Faifan tsotsa | PIAB |
| Mai ɗauka | KF/NSK |
| Vacuum famfo | PIAB |
| PLC | Siemens / Schneider |
| HMI | Siemens / Schneider |
| Sarka farantin / sarkar | Intralox/rexnord/Regina |
Babban bayanin tsarin




Ƙarin nunin bidiyo
- Servo coordinate case packer don kwalaben gilashi tare da ɓangaren kwali